




焊接機器人按結構坐標系分為幾類?
來源:http://www.opedost.com/ 發(fā)布時間:2021-07-28 瀏覽次數(shù):0
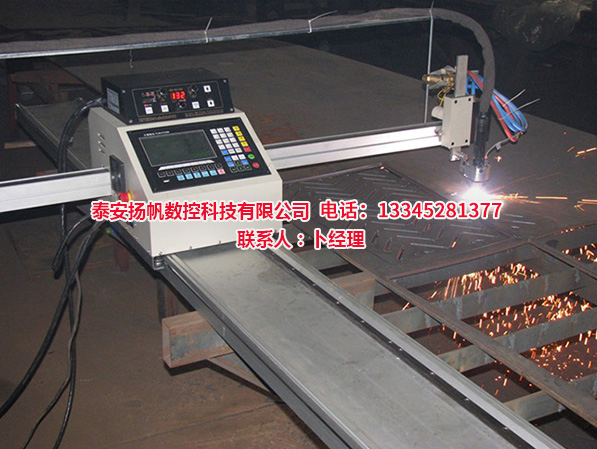
1)直角坐標型這類機器人的結構和控制方案與機床類似,其到達空間位置的三個運動(x、y、z)是由直線運動構成,這種形式的機器人優(yōu)點是運動學模型簡單,各軸線位移分辨率在操作容積內任一點上均為恒定,控制精度容易提高;缺點是機構龐大,工作空間小,操作靈活性較差。簡易和專用焊接機器人常采用這種形式。
1) The structure and control scheme of the Cartesian coordinate type robot is similar to that of the machine tool. Its three motions (x, y and z) reaching the spatial position are composed of linear motion. The advantages of this type of robot are that the kinematic model is simple, the displacement resolution of each axis is constant at any point in the operating volume, and the control accuracy is easy to be improved; The disadvantage is that the mechanism is huge, the working space is small, and the operation flexibility is poor. This form is often used by simple and special welding robots.
2)圓柱坐標型這類機器人在基座水平轉臺上裝有立柱,水平臂可沿立柱作上下運動并可在水平方向伸縮。這種結構方案的優(yōu)點是末端操作可獲得較高速度,缺點是末端操作器外伸離開立柱軸心愈遠,其線位移分辨精度愈低。
2) The cylindrical coordinate robot is equipped with a column on the base horizontal turntable, and the horizontal arm can move up and down along the column and retract in the horizontal direction. The advantage of this structural scheme is that the end operator can obtain high speed, but the disadvantage is that the farther the end operator extends away from the axis of the column, the lower the linear displacement resolution accuracy.

3)球坐標型與圓柱坐標結構相比較,這種結構形式更為靈活。但采用同一分辨率的碼盤檢測角位移時,伸縮關節(jié)的線位移分辨率恒定,但轉動關節(jié)反映在末端操作器上的線位移分辨率則是個變量,增加了控制系統(tǒng)的復雜性。
3) Compared with cylindrical coordinate structure, spherical coordinate structure is more flexible. However, when the code disk with the same resolution is used to detect the angular displacement, the linear displacement resolution of the telescopic joint is constant, but the linear displacement resolution of the rotating joint reflected on the end operator is a variable, which increases the complexity of the control system.
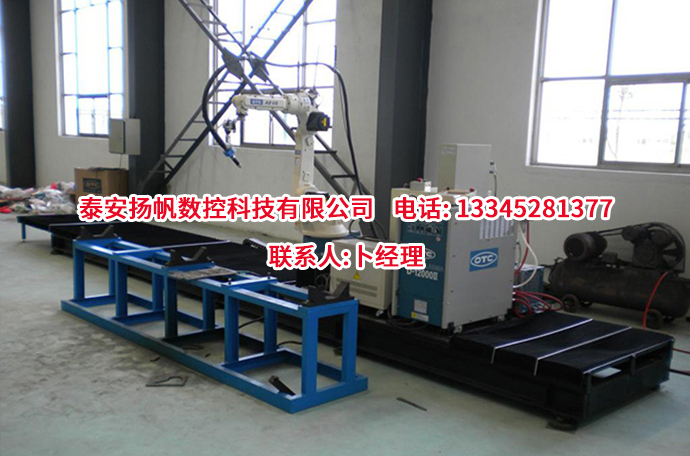
4)全關節(jié)型全關節(jié)型機器人的結構類似人的腰部和手部,其位置和姿態(tài)全部由旋轉運動實現(xiàn),其優(yōu)點是機構緊湊,靈活性好,占地面積小,工作空間大,可獲得較高的末端操作器線速度;其缺點是運動學模型復雜,高精度控制難度大,空間線位移分辨率取決于機器人手臂的位姿。
4) The structure of all joint robot is similar to human waist and hand. Its position and posture are realized by rotary motion. Its advantages are compact mechanism, good flexibility, small floor area, large workspace and high linear speed of end manipulator; Its disadvantage is that the kinematic model is complex, high-precision control is difficult, and the spatial linear displacement resolution depends on the pose of the robot arm.






